Lidar data in its delivered state usually contains many more points than PC CAD based systems can handle. Not naming any names, but we’ve personally seem 30 million plus points bring well known PC CAD software to a grinding halt, locking up the session leading to a task manager shut down. All the points in a 30 acre project could hit that point. So there must be some filtering (weeding) in place even for small projects.
We have addressed this for years in our Mass Points Processor …
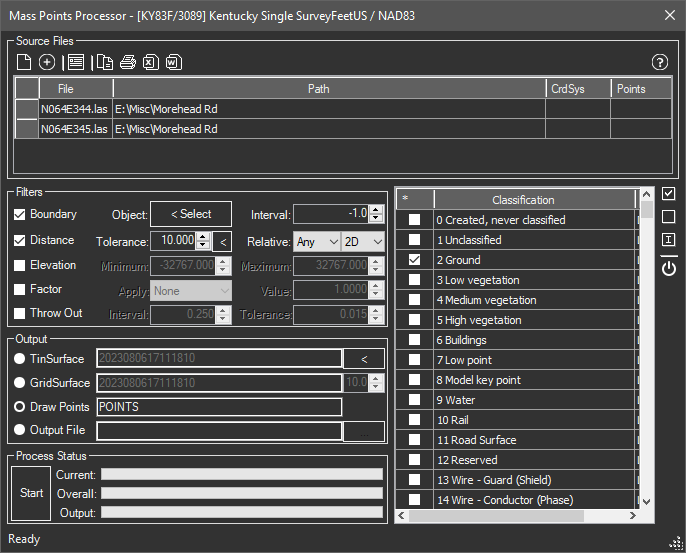
… but one problem always popped up. How close together could the points be and still not crash the system. A loose value brought speed and stability but that loose value was a problem in ditches, roads and similar suffered from the lack of points.
We have now addressed this issue with filtering zones, which are simply closed polylines in the drawing before surface creation that tells the mass points processor how dense to retain the points inside those boundaries. Now you can specify a loose value for the overall project, and use the polyline boundaries with their own density values. Consider the following graphics example.
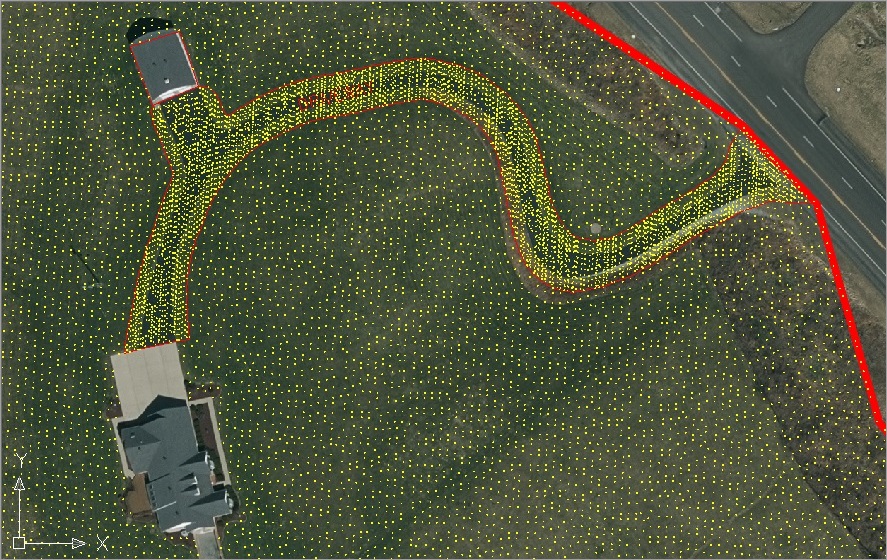
In this case we specified an loose default value of 10′ for the overall project and a tight 1′ value for the roadway area. Special values exist for remove all points (inside the buildings) and keep all (which would not throw out any).
In this case we created points but the same data could have been used to to directly to a TinSurface (or GridSurface) instead. Now users can get the densities they need only where they need it, not choking down or crashing the project.